Edit3: Matematici mali ešte jednu výhradu a tvrdili, že skalárny súčet nesedí. Čo keby sme uvažovali o zloženom skalárnom súčte, alebo parciálnom. Vidím to takto á opäť vychádza, že pomer a+1=a, á teda že Rusi toto museli vedieť v roku 1860, keď chránili Rasputina ako poradcu kráľa a kráľovnej:
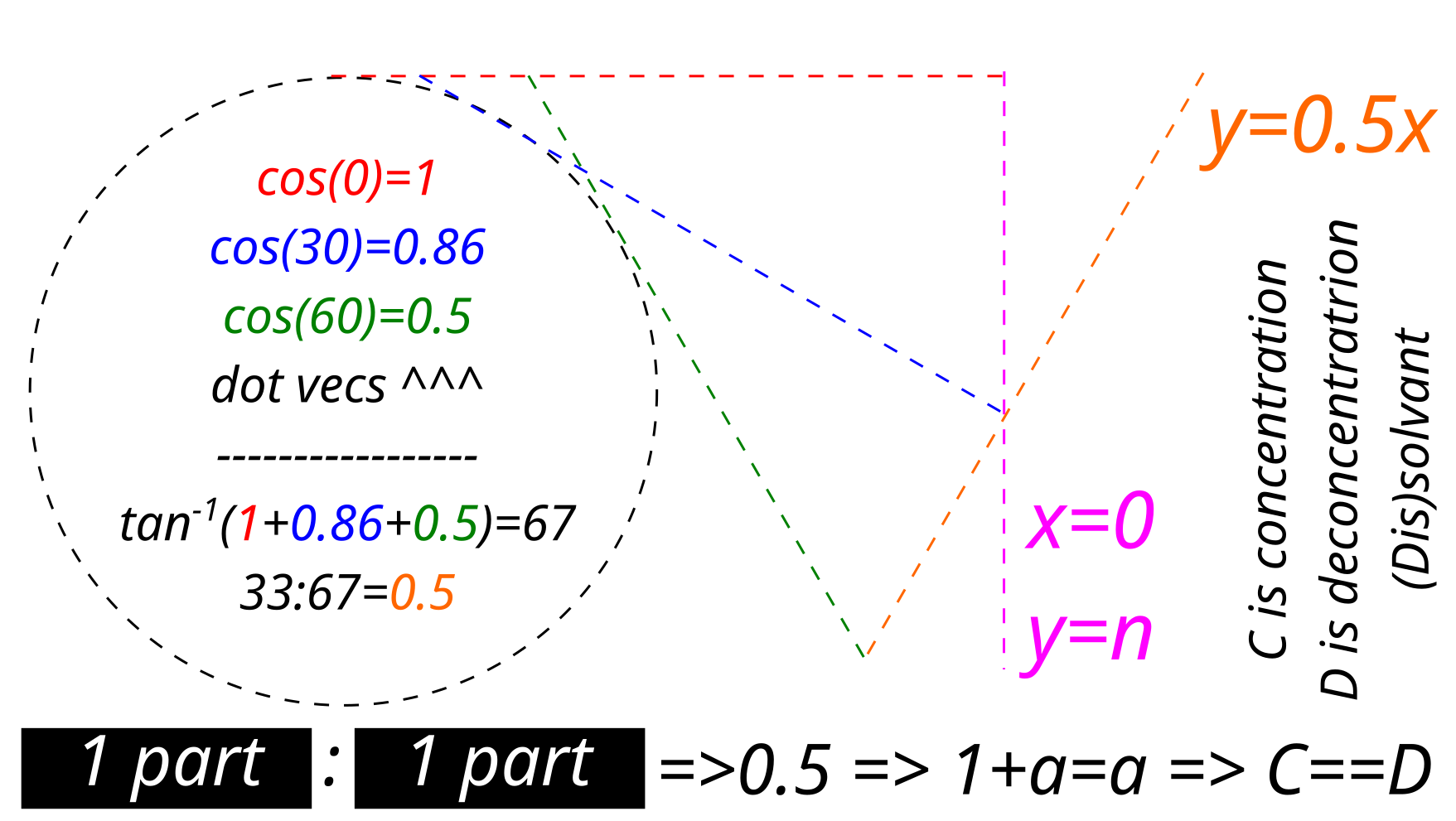
Otázka bola, ako sa koncentrát môže rovnať dekoncentrátu, pokúsim sa to nakresliť tak, aby rozumel škôlkár:
Á počítajme ďalej tieto uhly: (0+30+60+90)/4=45°, teda? y=0.5x
Edit2: Dnes som stretol rusky hovoriaceho pána, ktorý mi vravel á asi bol len nosič informácie v mysli, lebo vravel: ťažko na tom svete, však? reku hej. potom bola informácia, že ak toto nebolí, tak máš správny výpočet. Reku došlo mi, ak a+1=a, tak koncentrácia zriedenej o jedna sa rovná pôvodnej, teda ak mi aj dajú jed, nemôžu ho koncentrovať ani riediť, lebo sa rovná zriedenej časti. Je to tak, nebolelo to, zrejme som sa týmto výpočtom zachránil:
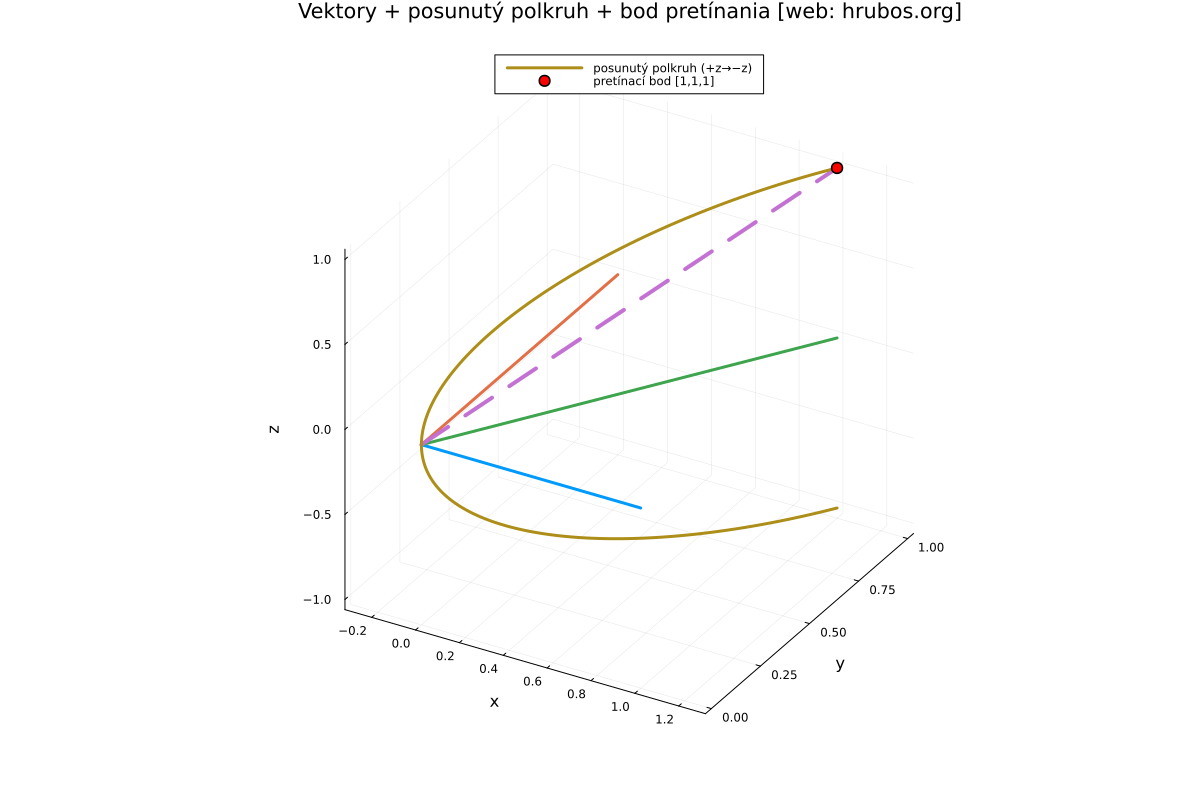
https://hrubos.tech/blogy/content/images/20260111185823-rotujuce_teleso_dva_body_zvisla_os.gif
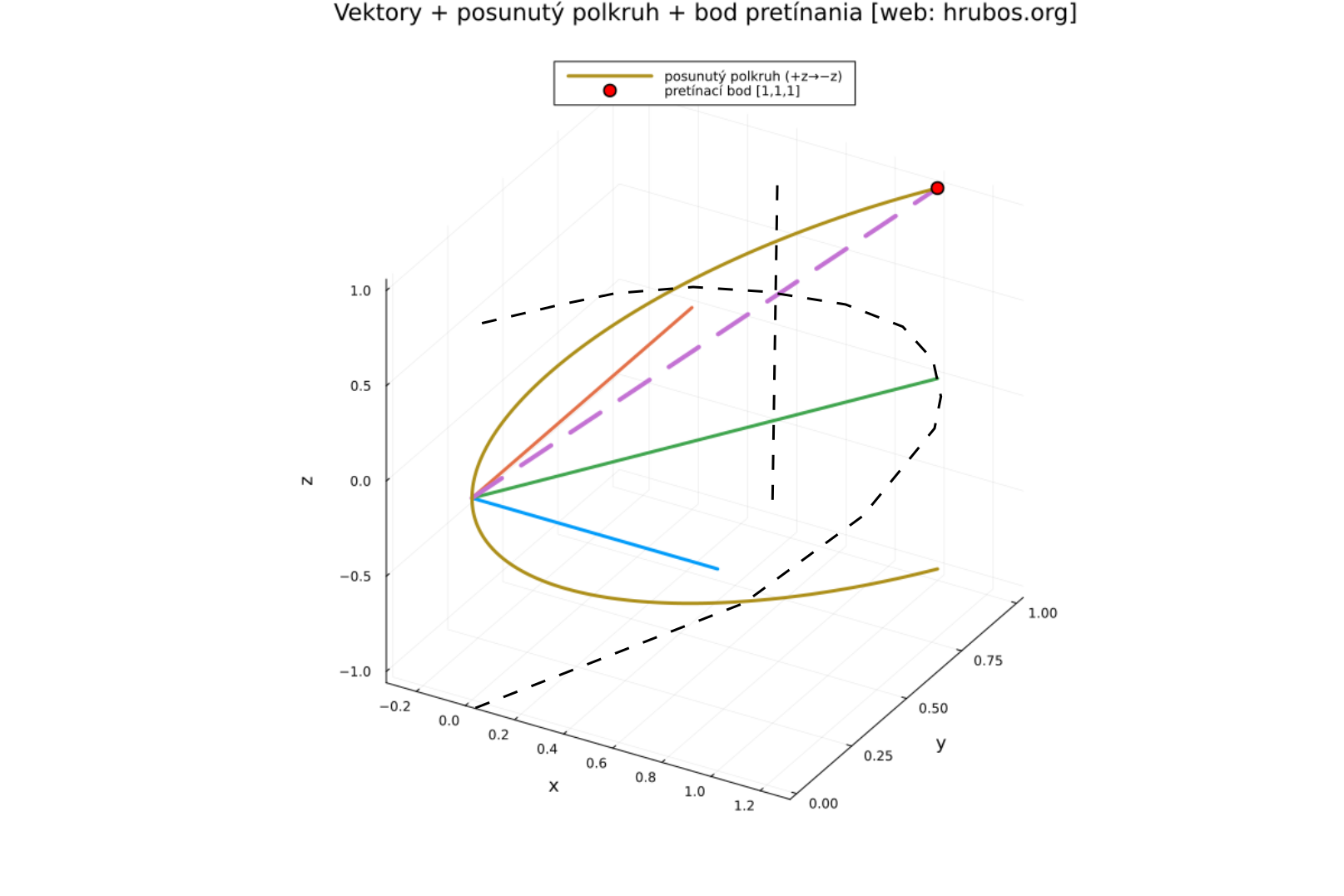
Dnes sme s matematikmi hľadali riešenie 1+a=a, zaujímalo nás, či je trajektória dlhšia, ale ja som ešte teamu pridal názor, že pozrime sa na spád medzi dvoma rotujúcimi bodmi na dotyčnici výsledného vektora s dlhšími čiarkami. Oh, samoška za vypľutie kódu ďakujem kamoške AI gpt, konečne som ju navigoval, aby nakreslila, čo si prajem po hodinke diskusií á je to toto ^^^ Prečo sa jedná o dotyčnicu? Lebo to je energia pod grafom, á teda ukazuje, že na dlhšej dráhe stačí menšia energia ;) Ako je to možné? Tak ako ukazuje animácia :)
Vysvetlenie na statickom obraze: Hľadám VÝSLEDNÝ vektor, ktorý sa ohne tak, aby rovnica sedela:
Prečo sa vektor ohnutím skráti môžme vysvetliť aj čiernou zrkadlovou ohnutou čiarkovanou:
Áno ^^^ do roviny x,y pretože logicky riešime rovnicu 0 * x = y :) Á vravia ľudia, x=0, no ja odpovedám, nie je to celkom tak, lebo riešenie v RxR je pre nekonečno núl a teda 0.001==0 aj 0.0001==0 ✓ Aj do mínusu okolo osi a preto je nutná celá rotácia telesa ^^^
Kód je dnes nepodstatný, už ho vypľuje stroj, tu je:
using Pkg
Pkg.add("Plots")
using Plots
gr()
############################
# Parametre polkruhu
############################
r = 0.5 # polomer polkruhu
center = [1.0, 0.0, 0.0] # posunutý stred polkruhu od osi Z
n_t = 50 # body polkruhu
n_phi = 60 # body rotácie povrchu
n_frames = 60 # počet snímok animácie
t = range(pi/2, 3pi/2, length=n_t) # polkruh +z → -z
phi_anim = range(0, 2pi, length=n_frames) # rotácia bodov okolo Z
# lokálne súradnice polkruhu
x0 = r*cos.(t)
y0 = r*cos.(t)
z0 = r*sin.(t)
############################
# Vektory
############################
vx = [1.0,0.0,0.0]
vy = [0.0,1.0,0.0]
vxy = vx + vy
vxyz = [1.0,1.0,1.0]
############################
# Zvislá os pre referenciu
############################
z_min = -1.5
z_max = 1.5
axis_x = 0.0
axis_y = 0.0
############################
# Animácia – dva body
############################
anim = @animate for k in 1:n_frames
phi = phi_anim[k] # uhol rotácie bodov
# generovanie povrchu
X = zeros(n_t, n_t)
Y = zeros(n_t, n_t)
Z = zeros(n_t, n_t)
for i in 1:n_t
for j in 1:n_t
angle = 2pi*j/n_t
X[i,j] = cos(angle)*(x0[i] + center[1]) - sin(angle)*center[2]
Y[i,j] = sin(angle)*(x0[i] + center[1]) + cos(angle)*center[2]
Z[i,j] = z0[i]
end
end
# prvý bod – na povrchu trubky
i_bod = Int(round(n_t/2))
j_bod = Int(round(n_t/2))
intersection1 = [
cos(phi)*(X[i_bod,j_bod]-0) - sin(phi)*(Y[i_bod,j_bod]-0),
sin(phi)*(X[i_bod,j_bod]-0) + cos(phi)*(Y[i_bod,j_bod]-0),
Z[i_bod,j_bod]
]
# druhý bod – rotuje v rovine x,y na výške z=1
radius2 = 1.0 # polomer rotácie bodu v rovine x,y
intersection2 = [
radius2*cos(phi) + 0, # posunutie od osi Z
radius2*sin(phi) + 0,
1.0 # výška z=1
]
# plot
p = plot(
xlabel="x", ylabel="y", zlabel="z",
aspect_ratio=:equal,
legend=:top,
title="Solution of equation 1+a=a [A.Einstein feat. web hrubos.tech]",
size=(1200,800)
)
# povrch telesa – priesvitný
surface!(p, X, Y, Z, alpha=0.1, color=:blue, label="see slop from touching dashed line")
# vektory – v popredí
quiver!(p, [0],[0],[0], quiver=([vx[1]],[vx[2]],[vx[3]]), linewidth=3, color=:red, label="x")
quiver!(p, [0],[0],[0], quiver=([vy[1]],[vy[2]],[vy[3]]), linewidth=3, color=:green, label="y")
quiver!(p, [0],[0],[0], quiver=([vxy[1]],[vxy[2]],[vxy[3]]), linewidth=3, color=:orange, label="x+y")
quiver!(p, [0],[0],[0], quiver=([vxyz[1]],[vxyz[2]],[vxyz[3]]), linewidth=4, linestyle=:dash, color=:black, label="(1,1,1)")
# body na trubke
scatter!(p, [intersection1[1]], [intersection1[2]], [intersection1[3]],
markersize=8, color=:magenta, label="towards down")
scatter!(p, [intersection2[1]], [intersection2[2]], [intersection2[3]],
markersize=8, color=:cyan, label="from top down by touching vector")
# zvislá os
plot!([axis_x, axis_x], [axis_y, axis_y], [z_min, z_max],
linewidth=2, color=:black, linestyle=:dot, label="rotating around this axe")
end
############################
# Uloženie animácie
############################
gif(anim, "rotujuce_teleso_dva_body_zvisla_os.gif", fps=20)
A načo nám celý tento hókus-pókus bude? Uvažujme takto: Majme globálne otepľovanie á ak stupeň Celzia je to isté ako stupeň plus jedna. Vidíme riešenie ako symetrické teleso. Teda, čo je riešením symetrie? No zrkadlo, teda opak G.O. namiesto otepliť teda schladiť systém. Á toto pekne vidieť ^^^ Prečo môžeme uvažovať o symetrii riešenia G.O. ? No á ktorú polrovinu majú spoločnú v prvom a treťom kvadrante funkcie z definícií sym [f(x)=-f(x)] & asym [f(x)=f(-x)] ? Teda | _ | && _ / * Áno prvý a tretí kvadrant ak idú obe cez [0,0], teda ľavú a pravú polrovinu symetricky, ak to teda trochu preženieme aj pre 3D rez ^^^
Comments “Ako si predstavujem riešenie rovnice 1+a=a”